
|
www.riscos.com Technical Support: |
This Appendix relates to the implementation of compiler code-generators and language run-time library kernels for the Advanced RISC Machine (ARM) but is also a useful reference when interworking assembly language with high level language code.
The reader should be familiar with the ARM's instruction set, floating-point instruction set and assembler syntax before attempting to use this information to implement a code-generator. In order to write a run-time kernel for a language implementation, additional information specific to the relevant ARM operating system will be needed (some information is given in the sections describing the standard register bindings for this procedure-call standard).
The main topics covered in this Appendix are the procedure call and stack disciplines. These disciplines are observed by Acorn's C language implementation for the ARM and, eventually, will be observed by other high level language compilers too. Because C is the first-choice implementation language for RISC OS applications, the utility of a new language implementation for the ARM will be related to its compatibility with Acorn's implementation of C.
At the end of this document are several examples of the usage of this standard, together with suggestions for generating effective code for the ARM.
The ARM Procedure Call Standard (APCS) is a set of rules which regulate and facilitate calls between separately compiled or assembled program fragments.
The APCS defines:
Since the ARM CPU is used in a wide variety of systems, the APCS is not a single standard, but a consistent family of standards. See APCS variants for details of the variants in the family. Implementors of run-time systems, operating systems, embedded control monitors, etc., must choose the variant(s) most appropriate to their requirements.
Naturally, there can be no binary compatibility between program fragments which conform to different members of the APCS family. Those concerned with long-term binary compatibility must choose their options carefully.
Note: 'function' is used to mean function, procedure or subroutine.
Throughout its history, the APCS has compromised between fastest, smallest and easiest to use.
The criteria considered to be important are:
Overall, compact code and a clear definition have been ranked most highly, with simplicity and ease of use ahead of performance in matters of fine detail where the impact on performance is small.
This section defines the ARM Procedure Call Standard.
A program fragment which conforms to the APCS while making a call to an external function (one which is visible between compilation units) is said to be conforming. A program which conforms to the APCS at all instants of execution is said to be 'strictly conforming' or to 'conform strictly'.
Note: In general, compiled code is expected to be strictly conforming; hand-written code merely conforming.
Whether or not (and when) program fragments for a particular ARM-based environment are required to conform strictly to the APCS is part of the definition of that environment.
In the following sections, clauses following 'shall' and 'shall not' are obligations which must be met in order to conform to the APCS.
The ARM has 15 visible general registers, a program counter register and 8 floating-point registers.
In non-user machine modes, some general registers are shadowed. In all modes, the availability of the floating-point instruction set depends on the processor model, hardware and operating system.
| Name | Number | APCS Role | |||
|---|---|---|---|---|---|
| a1 | 0 | argument 1 / integer result / scratch register | |||
| a2 | 1 | argument 2 / scratch register | |||
| a3 | 2 | argument 3 / scratch register | |||
| a4 | 3 | argument 4 / scratch register | |||
| v1 | 4 | register variable | |||
| v2 | 5 | register variable | |||
| v3 | 6 | register variable | |||
| v4 | 7 | register variable | |||
| v5 | 8 | register variable | |||
| sb/v6 | 9 | static base / register variable | |||
| sl/v7 | 10 | stack limit / stack chunk handle / reg. variable | |||
| fp | 11 | frame pointer | |||
| ip | 12 | scratch register / new-sb in inter-link-unit calls | |||
| sp | 13 | lower end of current stack frame | |||
| lr | 14 | link address / scratch register | |||
| pc | 15 | program counter | |||
The 16 integer registers are divided into 3 sets:
The 5 frame registers fp, ip, sp, lr and pc have dedicated roles in all variants of the APCS.
The ip register has a dedicated role only during function call; at other times it may be used as a scratch register.
Note: Conventionally, ip is used by compiler code generators as the/a local code generator temporary register.
There are dedicated roles for sb and sl in some variants of the APCS; in other variants they may be used as callee-saved registers.
The APCS permits lr to be used as a register variable when not in use during a function call. It further permits an ARM system specification to forbid such use in some, or all, non-user ARM processor modes.
Each ARM floating-point (FP) register holds one FP value of single, double, extended or internal precision. A single-precision value occupies 1 machine word; a double-precision value 2 words; an extended precision value occupies 3 words, as does an internal precision value.
| Name | Number | APCS Role |
|---|---|---|
| f0 | 0 | FP argument 1 / FP result / FP scratch register |
| f1 | 1 | FP argument 2 / FP scratch register |
| f2 | 2 | FP argument 3 / FP scratch register |
| f3 | 3 | FP argument 4 / FP scratch register |
| f4 | 4 | floating point register variable |
| f5 | 5 | floating point register variable |
| f6 | 6 | floating point register variable |
| f7 | 7 | floating point register variable |
The floating-point (FP) registers are divided into two sets, analogous to the subsets a1-a4 and v1-v5/v7 of the general registers:
The stack is a singly-linked list of 'activation records', linked through a 'stack backtrace data structure' (see below), stored at the high-address end of each activation record.
The stack shall be readable and writable by the executing program.
Each contiguous chunk of the stack shall be allocated to activation records in descending address order. At all instants of execution, sp shall point to the lowest used address of the most recently allocated activation record.
There may be multiple stack chunks, and there are no constraints on the ordering of these chunks in the address space.
Associated with sp is a possibly-implicit stack chunk limit, below which sp shall not be decremented (see APCS variants).
At all instants of execution, the memory between sp and the stack chunk limit shall contain nothing of value to the executing program: it may be modified unpredictably by the execution environment.
The stack chunk limit is said to be implicit if chunk overflow is detected and handled by the execution environment. Otherwise it is explicit.
If the stack chunk limit is implicit, sl may be used as v7, an additional callee-saved variable register.
If the conditions of the remainder of this subsection hold at all instants of execution, then the program conforms strictly to the APCS; otherwise, if they hold at and during external (inter-compilation-unit-visible) function calls, the program merely conforms to the APCS.
If the stack chunk limit is explicit, then:
Note: sl  stack chunk limit + 256 allows the most common limit checks to be made very cheaply during function entry.
stack chunk limit + 256 allows the most common limit checks to be made very cheaply during function entry.
This final requirement implies that on changing stack chunks, sl and sp must be loaded simultaneously by means of an:
LDM ..., {..., sl, sp}.
In general, this means that return from a function executing on an extension chunk, to one executing on an earlier-allocated chunk, should be via an intermediate function invocation, specially fabricated when the stack was extended.
The values of sl, fp and sp shall be multiples of 4.
The value in fp shall be zero or shall point to a list of stack backtrace data structures which partially describe the sequence of outstanding function calls.
If this constraint holds when external functions are called, the program is conforming; if it holds at all instants of execution, the program is strictly conforming).
The stack backtrace data structure has the format shown below:
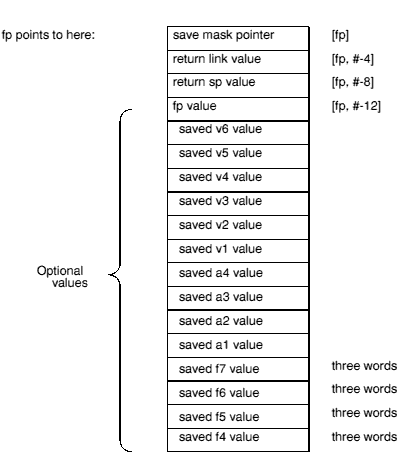
The above picture shows between four and twenty-six words, with those words higher on the page being at higher addresses in memory. The values shown inside the large brackets are optional, and their presence need not imply the presence of any other. The floating point values are stored in an internal format, and occupy three words each.
If function invocation A calls function B, then A is called a direct ancestor of the invocation of B. If invocation A[1] calls invocation A[2] calls... calls B, then each of the A[i] is an ancestor of B and invocation A[i] is 'more recent' than invocation A[j] if i > j.
The return fp value shall be 0, or shall be a pointer to a stack backtrace data structure created by an ancestor of the function invocation which created the backtrace structure pointed to by fp. No more recent ancestor shall have created a backtrace structure.
Note: There may be any number of tail-called invocations between invocations which create backtrace structures.
The return link value, return sp value and return fp value are, respectively, the values to restore to pc, sp and fp at function exit.
In the 32-bit PC variant of the APCS, the save code pointer shall point twelve bytes beyond the start of the sequence of instructions that created the stack backtrace data structure.
In the 26-bit PC variant of the APCS, the save code pointer, when cleared of PSR and mode bits, shall point twelve bytes beyond the start of the sequence of instructions that created the stack backtrace data structure.
At the instant when control arrives at the target function:
Note: In 26-bit variants of the APCS, lr contains the PC + PSR value to restore to pc on exit from the function (see APCS variants)
If the target function is reentrant (see The Stack) then it has two entry points and control arrives:
Note: Sometimes the two entry points are at the same address; usually they will be separated by a single instruction.
On arrival at the intra-link-unit entry point, sb shall identify the static data of the link unit which contains both the caller and the callee.
On arrival at the inter-link-unit entry point, ip shall identify the static data of the link unit containing the target function, or the target function shall make neither direct nor indirect use of static data.
In practice this usually means the callee must be a leaf function making no direct use of static data.
The way in which sb 'identifies' the static data of a link unit is not specified by the APCS.
If the call is by tail continuation, 'calling function' means that which would be returned to, were the tail continuation converted to a return).
If code is not required to be reentrant or sharable then sb may be used as v6, an additional variable register.
Argument passing in the APCS is defined in terms of an ordered list of machine-level values passed from the caller to the callee, and a single word or floating point result passed back from the callee to the caller. Each value in the argument list shall be:
A callee may corrupt any of its arguments, howsoever passed.
Note: The APCS does not define the layout in store of records, arrays and so forth, used by ARM-targeted compilers for C, Pascal, Fortran-77, etc.; nor does it prescribe the order in which language-level arguments are mapped into their machine-level representations. In other words, the mapping from language-level data types, and arguments to APCS words is defined by each language implementation, not by the APCS. Indeed, there is no formal reason why two ARM-targeted implementations of the same language should not use different mappings and, hence, not support cross-calling. Obviously, it would be very unhelpful to stand by this formal position so implementors are encouraged to adopt not just the letter of the APCS but also the natural mappings of source language objects into argument words. Guidance about this is given in C Language calling conventions.
At the instant control arrives at the target function, the argument list shall be allocated as follows:
A floating-point value not passed in a floating-point register is treated as 1, 2 or 3 integer values, as appropriate to its precision.
When the return link value for a function call is placed in the pc:
Note: a language implementation is not obliged to consider all single-word values simple. See C Language calling conventions)
The values of ip, lr, a2-a4, f1-f3 and any stacked arguments are undefined.
The definition of control return means that this is a 'callee saves' standard.
Note: In 32-bit ARM modes, the caller's PSR flags are not preserved across a function call. In 26-bit ARM modes, the caller's PSR flags are naturally reinstated when the return link pointer is placed in pc. Note that the N, Z, C and V flags from lr at the instant of entry must be reinstated; it is not sufficient merely to preserve the PSR across the call. Consider, a function ProcA which tail continues to ProcB as follows:
CMPS a1, #0 MOVLT a2, #255 MOVGE a2, #0 B ProcB
If ProcB merely preserves the flags it sees on entry, rather than restoring those from lr, the wrong flags may be set when ProcB returns direct to ProcA's caller. See APCS variants).
There are, currently, 2 x 2 x 2 x 2 = 16 APCS variants, derived from four independent choices.
The first choice - 32-bit PC vs 26-bit PC - is fixed by your ARM CPU.
The second choice - implicit vs explicit stack-limit checking - is fixed by a combination of memory-management hardware and operating system software: if your ARM-based environment supports implicit stack-limit checking then use it; otherwise use explicit stack-limit checking.
The third choice - of how to pass floating-point arguments - supports efficient argument passing in both of the following circumstances:
In each case, code conforming to one variant is not compatible with code conforming to the other.
Only the choice between reentrant and non-reentrant variants is a true user level choice. Further, as the alternatives are compatible, each may be used where appropriate.
Older ARM CPUs and the 26-bit compatibility mode of newer CPUs use a 24-bit, word-address program counter, and pack the 4 status flags (NZCV) and 2 interrupt-enable flags (IF) into the top 6 bits of r15, and the 2 mode bits (m0, m1) into the least-significant bits of r15. Thus r15 implements a combined PC + PSR.
Newer ARM CPUs use a 32-bit program counter (in r15) and a separate PSR.
In 26-bit CPU modes, the PC + PSR is written to r14 by an ARM branch with link instruction, so it is natural for the APCS to require the reinstatement of the caller's PSR at function exit (a caller's PSR is preserved across a function call).
In 32-bit CPU modes this reinstatement would be unacceptably expensive in comparison to the gain from it, so the APCS does not require it and a caller's PSR flags may be corrupted by a function call.
ARM-based systems vary widely in the sophistication of their memory management hardware. Some can easily support multiple, auto-extending stacks, while others have no memory management hardware at all.
Safe programming practices demand that stack overflow be detected.
The APCS defines conventions for software stack-limit checking sufficient to support efficiently most requirements (including those of multiple threads and chunked stacks).
The majority of ARM-based systems are expected to require software stack-limit checking.
Historically, many ARM-based systems have made no use of the floating point instruction set, or they used a software emulation of it.
On systems using a slow software emulation and making little use of floating-point, there is a small disadvantage to passing floating-point arguments in floating-point registers: all variadic functions (such as printf) become slower, while only function calls which actually take floating-point arguments become faster.
If your system has no floating-point hardware and is expected to make little use of floating point, then it is better not to pass floating-point arguments in floating-point registers. Otherwise, the opposite choice is best.
The reentrant variant of the APCS supports the generation of code free of relocation directives (position independent and addressing all data (indirectly) via a static base register). Such code is ideal for placement in ROM and can be multiply threaded (shared between several client processes).
In general, code to be placed in ROM or loaded into a shared library is expected to be reentrant, while applications are expected not to be.
See also C Language calling conventions.
APCS-2 - the second definition of The ARM Procedure Call Standard - is described in the RISC OS 3 Programmer's Reference Manual.
APCS-R (APCS-2 for Acorn's RISC OS) is the following variant of APCS-3:
with the Acorn-specific constraints on the use of sl noted in APCS-2.
APCS-U (APCS-2 for Acorn's RISCiX) is the following variant of APCS-3:
The (in APCS-2) obsolescent APCS-A has no equivalent in APCS-3.
A floating point value occupies 1, 2, or 3 words, as appropriate to its type. Floating point values are encoded in IEEE 754 format, with the most significant word of a double having the lowest address.
The C compiler widens arguments of type float to type double to support inter-working between ANSI C and classic C.
Char, short, pointer and other integral values occupy 1 word in an argument list. Char and short values are widened by the C compiler during argument marshalling.
On the ARM, characters are naturally unsigned. In -pcc mode, the C compiler treats a plain char as signed, widening its value appropriately when used as an argument, (classic C lacks the signed char type, so plain chars are considered signed; ANSI C has signed, unsigned and plain chars, the third, conventionally reflecting the natural signedness of characters).
A structured value occupies an integral number of integer words (even if it contains only floating point values).
Argument values are marshalled in the order written in the source program.
If passing floating-point (FP) arguments in FP registers, the first 4 FP arguments are loaded into FP registers.
The first 4 of the remaining argument words are loaded into a1-a4, and the remainder are pushed on to the stack in reverse order (so that arguments later in the argument list have higher addresses than those earlier in the argument list). As a consequence, a FP value can be passed in integer registers, or even split between an integer register and the stack.
This follows from the need to support variadic functions, (functions having a variable number of arguments, such as printf, scanf, etc.). Alternatives which avoid the passing of FP values in integer registers require that a caller know that a variadic function is being called, and use different argument marshalling conventions for variadic and non-variadic functions.
A non-simple type is any non-floating-point type of size greater than 1 word (including structures containing only floating-point fields), and certain 1 word structured types.
A structure is called integer-like if its size is less than or equal to one word, and the offset of each of its addressable sub-fields is zero. An integer-like structured result is considered simple and is returned in a1.
struct {int a:8, b:8, c:8, d:8;} and union {int i; char *p;} are both integer-like;
struct {char a; char b; char c; char d;} is not.
A multi-word or non-integer-like result is returned to an address passed as an additional first argument to the function call. At the machine level:
TT tt = f(x, ...);
is implemented as:
TT tt; f(&tt, x, ...);
A complete discussion of function entry is complex; a few of the most important issues and special cases are discussed here.
The important issues for function entry are:
A function is called leaf if its body contains no function calls.
If function F calls function G immediately before an exit from F, the call- exit sequence can often be replaced instead by a return to G. After this transformation, the return to G is called a tail call or tail continuation.
There are many subtle difficulties with tail continuations. Suppose stacked arguments are unstacked by callers (almost mandatory for variadic callees), then G cannot be directly tail-called if G itself takes stacked arguments. This is because there is no return to F to unstack them. Of course, if this call to G takes fewer arguments than the current call to F, then some of F's stacked arguments can be replaced by G's stacked arguments. However, this can be hard to assert if F is variadic. More straightforwardly, there may be no tail-call of G if the address of any of F's arguments or local variables has 'leaked out' of F. This is because on return to G, the address may be invalidated by adjustment of the stack pointer. In general, this precludes tail calls if any local variable or argument has its address taken.
If a function is a leaf function, or all function calls from its body are tail calls and, in both cases, the function uses no v-registers (v1-v7) then the function need create no stack backtrace structure (such functions will also be termed 'frameless').
A leaf function which makes no use of static data need not establish a static base.
The ARM shared library mechanism supports both the direct linking together of functions into a link unit, and the indirect linking of functions with the stubs of other link units. Thus a reentrant function can be entered directly via a call from the same link unit (an intra-link-unit call), or indirectly via a function pointer or direct call from another link unit (an inter-link-unit call).
The general scheme for establishing the static base in reentrant code is:
intra MOV ip, sb ; intra link unit (LU) calls target here
inter ; inter-LU calls target here, having loaded
; ip via an inter-LU or fn-pointer veneer.
<create backtrace structure, saving sb>
MOV sb, ip ; establish sb for this LU
<rest of entry>
Code which is not required to be reentrant need not use a static base. Code which is reentrant is marked as such, which allows the linker to create the inter-LU veneers needed between independent reentrant link units, and between reentrant and non-reentrant code.
For non-reentrant, non-variadic functions the stack backtrace structure can be created in just 3 instructions, as follows:
MOV ip, sp ; save current sp, ready to save as old sp
STMFD sp!, {a1-a4, v1-v5, sb, fp, ip, lr, pc} ; as needed
SUB fp, ip, #4
Each argument register a1-a4 need only be saved if a memory location is needed for the corresponding parameter (because it has been spilled by the register allocator or because its address has been taken).
Each of the registers v1-v7 need only be saved if it used by the called function. The minimum set of registers to be saved is {fp, old-sp, lr, pc}.
A reentrant function must avoid using ip in its entry sequence:
STMFD sp!, {sp, lr, pc}
STMFD sp!, {a1-a4, v1-v5, sb, fp} ; as needed
ADD fp, sp, #8+4*|{a1-a4, v1-v5, sb, fp}| ; as used above
sb (aka v6) must be saved by a reentrant function if it calls any function from another link unit (which would alter the value in sb). This means that, in general, sb must be saved on entry to all non-leaf, reentrant functions.
For variadic functions the entry sequence is more complicated again. Usually, it will be desired or required to make a contiguous argument list on the stack. For non-reentrant variadic functions this can be done by:
MOV ip, sp ; save current sp, ready to save as old sp
STMFD sp!, {a1-a4} ; push arguments on stack
SFMFD f0, 4, [sp] ; push FP arguments on stack...
STMFD sp!, {v1-v6, fp, ip, lr, pc} ; as needed
SUB fp, ip, #20 ; if all of a1-a4 pushed...
It is not necessary to push arguments corresponding to fixed parameters (though saving a1-a4 is little more expensive than just saving, say, a3-a4).
If floating point arguments are not being passed in floating point registers then there is no need for the SFMFD. SFM is not supported by the issue-1 floating-point instruction set and must be simulated by 4 STFEs. See Function entry - saving and restoring floating point registers below.
For reentrant variadic functions, the requirements are yet more complicated and the sequence becomes less elegant.
The issue-2 floating-point instruction set defines two new instructions, Store Floating Multiple (SFM) and Load Floating Multiple (LFM), for saving and restoring the floating-point registers, as follows:
On function entry, a typical use of SFM might be as follows:
SFMFD f4, 4, [sp]! ; save f4-f7 on a Full Descending stack,
; adjusting sp as values are pushed.
On function exit, the corresponding sequence might be as follows:
LFMEA f4, 4, [fp, #-N] ; restore f4-f7; fp-N points just
; above the floating point save area.
On function exit, sp-relative addressing may be unavailable if the stack has been discontiguously extended.
In issue-1 instruction set compatibility modes, SFM and LFM have to be simulated using sequences of STFEs and LDFEs.
In some environments, stack overflow detection will be implicit: an off stack reference will cause an address error or memory fault which may, in turn, cause stack extension or program termination.
In other environments, the validity of the stack must be checked on function entry and, perhaps at other times. There are three cases:
The third case does not arise in C, save with stack-based implementations of the non-standard, BSD-Unix alloca() function. The APCS does not support alloca() in a straightforward manner.
In Modula-2, Pascal and other languages there may be arrays created on block entry or passed as open array arguments, the size of which is unknown until run time. These are located in the callee's stack frame, so impact stack limit checking. In practice, this adds little complication, as discussed in Stack limit checking - vari-sized frames.
The check for stack limit violation is made at the end of the function entry sequence, by which time ip is available as a work register. If the check fails, a standard run-time support function ('__rt_stkovf_split_small' or '__rt_stkovf_split_big') is called. Each environment which supports explicit stack limit checking must provide these functions, which can do one of the following:
For frames of 256 bytes or less the limit check is as follows:
<create stack backtrace structure> CMPS sp, sl BLLT |__rt_stkovf_split_small| SUB sp, sp, #<size of locals> ; <= 256, by hypothesis
This adds 2 instructions and, in general, only 2 cycles to function entry.
After a call to __rt_stkovf_split_small, fp and sp do not, necessarily, point into the same stack chunk. Arguments passed on the stack must be addressed by offsets from fp, not by offsets from sp.
For frames bigger than 256 bytes, the limit check proceeds as follows:
SUB ip, sp, #FrameSizeBound ; can be done in 1 instr CMPS ip, sl BLLT |__rt_stkovf_split_big| SUB sp, sp, #InitFrameSize ; may take more than 1 instr
FrameSizeBound can be any convenient constant at least as big as the largest frame the function will use. Note that functions containing nested blocks may use different amounts of stack at different instants during their execution.
InitFrameSize is the initial stack frame size: subsequent adjustments within the called function require no limit check.
After a call to __rt_stkovf_split_big, fp and sp do not, necessarily, point into the same stack chunk. Arguments passed on the stack must be addressed by offsets from fp, not by offsets from sp.
(For Pascal-like languages).
The handling of frames the size of which is unknown at compile time, is identical to the handling of large frames, save that:
The general scheme for stack layout in this case is as follows:
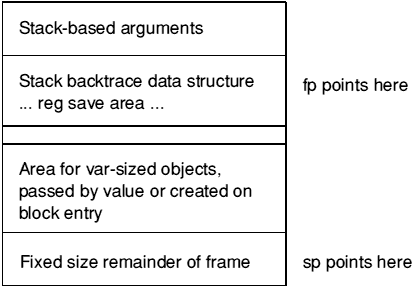
Objects notionally passed by value are actually passed by reference and copied by the callee.
The callee addresses the copied objects via pointers located in the fixed size part of the stack frame, immediately above sp. These can be addressed relative to sp. The original arguments are all addressable relative to fp.
After a call to __rt_stkovf_split_big, fp and sp do not, necessarily, point into the same stack chunk. Arguments passed on the stack must be addressed by offsets from fp, not by offsets from sp.
If a nested block extends the stack by an amount which can't be known until run time then the block entry must include a stack limit check.
A great deal of design effort has been devoted to ensuring that function exit can usually be implemented in a single instruction (this is not the case if floating-point registers have to be restored). Typically, there are at least as many function exits as entries, so it is always advantageous to move an instruction from an exit sequence to an entry sequence, (Fortran may violate this rule by virtue of multiple entries, but on average the rule still holds true). If exit is a single instruction then, in multi-exit functions, further instructions can be saved by replacing branches to a single exit by the exit instructions themselves.
Exit from functions which use no stack and save no floating point registers is particularly simple:
MOV pc, lr
(26-bit compatibility demands MOVS pc, lr to reinstate the caller's PSR flags, but this must not be used in 32-bit modes).
Exit from other functions which save no floating-point registers is by:
LDMEA fp, {v1-v5, sb, fp, sp, pc} ; as saved
Here, it is crucial that fp points just below the save code pointer, as this value is not restored, (LDMEA is a pre-decrement multiple load).(26-bit compatibility demands LDMEA fp, {regs}^, to reinstate the caller's PSR flags, but this must not be used in 32-bit modes).
The saving and restoring of floating-point registers is discussed above.
This section is not intended to be a general guide to the writing of code generators, but it seems worthwhile to highlight some of the optimisations that appear particularly relevant to the ARM and to this standard.
In order to make effective use of the APCS, compilers must compile code a procedure at a time. Line at a time compilation is insufficient.
In the case of leaf functions, much of the standard entry sequence can be omitted. In very small functions, such as those that frequently occur implementing data abstractions, the function-call overhead can be tiny.
Consider:
typedef struct {...; int a; ...} foo;
int foo_get_a(foo* f) {return(f-a);}
The function foo_get_a can compile to just:
LDR a1, [a1, #aOffset] MOV pc, lr ; MOVS in 26-bit modes
In functions with a conditional as the top level statement, in which one or other arm of the conditional is leaf (calls no functions), the formation of a stack frame can be delayed.
For example, the C function:
int get(Stream *s)
{
if (s->cnt > 0)
{ --s;
return *(s-p++);
}
else
{
...
}
}
... could be compiled (non-reentrantly) into:
get MOV a3, a1
; if (s->cnt > 0)
LDR a2, [a3, #cntOffset]
CMPS a2, #0
; try the fast case,frameless and heavily conditionalized
SUBGT a2, a2, #1
STRGT a2, [a3, #cntOffset]
LDRGT a2, [a3, #pOffset]
LDRBGT a1, [a2], #1
STRGT a2, [a3, #pOffset]
MOVGT pc, lr
; else, form a stack frame and handle the rest as normal code
MOV ip, sp
STMDB sp!, {v1-v3, fp, ip, lr, pc}
CMP sp, sl
BLLT |__rt_stkovf_split_small|
...
LDMEA fp, {v1-v3, fp, sp, pc}
This is only worthwhile if the test can be compiled using any spare of a1-a4 and ip, as scratch registers. This technique can significantly accelerate certain speed-critical functions, such as read and write character.
Finally, it is often worth applying the tail call optimisation, especially to procedures which need to save no registers.
For example:
extern void *malloc(size_t n)
{
return primitive_alloc(NOTGCABLEBIT, BYTESTOWORDS(n));
}
... is compiled (non-reentrantly) by the C compiler into:
malloc
ADD a1, a1, #3 ; 1S
MOV a2, a1, LSR #2 ; 1S - BYTESTOWORDS(n)
MOV a1, #1073741824 ; 1S - NOTGCABLEBIT
B primitive_alloc ; 1N+2S = 4S
In this case, the optimisation avoids saving and restoring the call-frame registers and saves 5 instructions (and many cycles-17 S cycles on an uncached ARM with N=2S).
There are some consequences of the ARM's architecture which, while not explicit in the ARM Procedure Call Standard, need to be understood by implementors of code intended to run in the ARM's SVC and IRQ modes.
An IRQ corrupts r14_irq, so IRQ-mode code must run with IRQs off until r14_irq has been saved.
A general solution to this problem is to enter and exit IRQ handlers written in high-level languages via hand-crafted wrappers, which on entry save r14_irq, change mode to SVC, and enable IRQs; and on exit restore the saved r14_irq, IRQ mode and the IRQ-enable state. Thus the handlers themselves run in SVC mode, avoiding the problem in compiled code.
SWIs corrupt r14_svc, so care has to be taken when calling SWIs in SVC mode.
In high-level languages, SWIs are usually called out of line, so it suffices to save and restore r14 in the calling veneer around the SWI. If a compiler can generate in-line SWIs, then it should, of course, also generate code to save and restore r14 in-line around the SWI, unless it is known that the code will not be executed in SVC mode.
With pre-ARM6-based ARMs (ARM2, ARM3), aborts corrupt r14_svc. This means that care has to be taken when causing aborts in SVC mode.
An abort in SVC mode may be symptomatic of a fatal error, or it may be caused by page faulting in SVC mode. Page faulting can occur because an instruction needs to be fetched from a missing page (causing a prefetch abort), or because of an attempted data access to a missing page. The latter may occur even if the SVC-mode code is not itself paged, (consider an unpaged kernel accessing a paged user-space).
A data abort is recoverable provided r14 contains nothing of value at the instant of the abort. This can be ensured by:
A prefetch abort is harder to recover from, and an aborting BL instruction cannot be recovered, so special action has to be taken to protect page faulting function calls.
In code compiled from C, r14 is saved in the 2nd or 3rd instruction of an entry sequence. Aligning all functions at addresses which are 0 or 4 modulo 16, ensures the critical part of the entry sequence cannot prefetch-abort. A compiler can do this by padding code sections to a multiple of 16 bytes, and being careful about the alignment of functions within code sections.
Data-aborts early in function entry sequences can be avoided by using a software stack-limit check.
A possible way to protect BL instructions from prefetch-aborts, is to precede each BL by a
MOV ip, pc
instruction. If the BL faults, the prefetch abort handler can safely overwrite r14 with ip before resuming execution at the target of the BL. If the prefetch abort is not caused by a BL then this action is harmless, as r14 has been corrupted anyway, (and, by design, contained nothing of value at any instant a prefetch abort could occur).